CS336 Lecture 3:LM Architecture 与 Hyperparameters
来源:Stanford CS336 Spring 2025 Lecture 3 官方讲义。主题是现代语言模型架构选择、超参数经验、训练稳定性技巧,以及推理时注意力结构的效率权衡。
0. 本讲主线
| 层级 | 内容 | 复习时要抓住什么 |
|---|---|---|
| Motivation | 从“标准 Transformer”出发看现代 LLM | 架构选择不是唯一真理,而是经验累积 |
| Core block | pre-norm、RMSNorm、去 bias、SwiGLU、parallel block | 现代模型越来越接近 LLaMA-like 配方 |
| Position | sine、absolute、relative、RoPE | RoPE 把位置信息放进 Q/K 的旋转里 |
| Hyperparameters | d_ff / d_model、head dim、深宽比、vocab size | 很多大模型的默认值惊人一致 |
| Regularization | dropout、weight decay | 预训练里的正则更多影响优化动态 |
| Stability | z-loss、QK norm、logit soft-capping | softmax 是稳定性风险高发区 |
| Attention variants | MQA、GQA、sliding window、full/local interleaving | 训练看 FLOPs,推理常被 KV cache 内存带宽限制 |
本讲核心观点:
-
最好的学习方式是亲手训练模型;第二好的方式是系统学习别人踩过的坑。
-
现代 LLM 的架构细节很多,但共识并不总是很强;pre-norm 是少数高度一致的选择。
-
不要把论文里的小改动都当成“必然更好”。很多选择来自工程、硬件、稳定性、推理成本,而不只是 validation loss。
-
如果从零实现一个强 baseline,保守选择通常是:pre-norm + RMSNorm + RoPE + SwiGLU + no bias + 标准 head/dim 比例。
1. 起点:原始 Transformer vs 现代简单变体
1.1 原始 Transformer 的典型选择
原始 Transformer 可以粗略记成:
| 模块 | 原始选择 |
|---|---|
| Position embedding | sine / cosine fixed positional embeddings |
| FFN activation | ReLU |
| Normalization | post-norm LayerNorm |
| Linear layers | 通常带 bias |
post-norm block 的形式大致是:
x = LayerNorm(x + Attention(x))
x = LayerNorm(x + MLP(x))这里 LayerNorm 在 residual addition 之后,因此 norm 会直接作用在主 residual stream 上。
1.2 CS336 Assignment 1 的现代变体
讲义指出,课程实现的版本更接近现代 LLM:
| 模块 | 现代简单变体 |
|---|---|
| Normalization | pre-norm |
| Position embedding | RoPE |
| FFN activation | SwiGLU |
| Bias terms | linear layers 和 norm 中通常去掉 bias |
pre-norm block 的形式大致是:
x = x + Attention(Norm(x))
x = x + MLP(Norm(x))关键差别:主 residual stream 可以比较直接地跨层传递,LayerNorm 不会每次都“截断”残差路径。
1.3 怎么理解架构选择?
讲义的态度非常实用:
-
不要只问“哪个架构理论上最好”,还要问“哪些模型真实用过,效果怎样”。
-
大模型论文里的差异很多,其中一些只是小工程改动。
-
观察主流 dense model release 可以看出趋势:大多数模型越来越接近 LLaMA-like 架构,但仍有不少例外。
2. Normalization:pre-norm、RMSNorm、double norm

右图是pre norm
2.1 Pre-norm vs post-norm
几乎所有现代 LLM 都使用 pre-norm。BERT 是 post-norm,OPT 350M 是一个讲义里提到的例外。
| 形式 | 简化公式 | 直觉 |
|---|---|---|
| post-norm | x = Norm(x + F(x)) | norm 直接作用在 residual stream 上 |
| pre-norm | x = x + F(Norm(x)) | residual stream 更像一条不被破坏的高速通道 |
pre-norm 的优势:
-
梯度传播更稳定。
-
更少出现 gradient spike。
-
对大网络更友好,可以支持更大的 learning rate。
-
早期说法是能减少 warmup 需求;现代语境下更重要的是稳定性。
记忆方式:
pre-norm = 先 norm,再进子层,最后加回 residual
post-norm = 先加 residual,再 norm2.2 为什么 residual stream 很重要?
Transformer 很深时,residual stream 是跨层传递信息和梯度的主干。如果每层都在 residual addition 后立刻做 norm,主干信号会被反复重标定。
pre-norm 的设计相当于:
主路径:x 直接往后走
分支:Norm(x) -> Attention/MLP -> 加回 x这保留了 residual connection 的好处,也让优化更容易。
2.3 Double norm
讲义提到一些新模型使用 “double norm” 思路,例如 Grok、Gemma 2;OLMo 2 使用 non-residual post norm。
不要把它和传统 post-norm 混为一谈。传统 post-norm 是把 norm 放在 residual addition 后并影响主残差流;double norm 更像是在 pre-norm 的基础上额外加一个块外规范化,用来改善稳定性,但尽量不破坏 residual stream 的主路径。
可以把它理解成:
x = x + F(Norm(x))
x = ExtraNorm(x) # 某些模型会在块外再做一次 norm实际实现取决于具体模型。
3. LayerNorm vs RMSNorm
3.1 LayerNorm
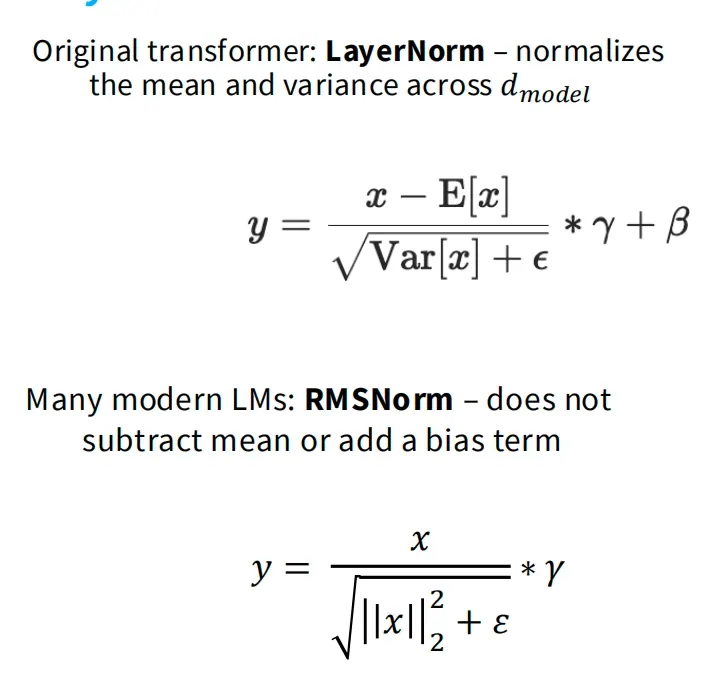
LayerNorm 在 d_model 维度上做均值和方差归一化:
LayerNorm(x) = (x - mean(x)) / sqrt(var(x) + eps) gamma + beta特点:
-
会减去均值。
-
会除以标准差。
-
通常有可学习参数
gamma和beta。 -
原始 Transformer、GPT-1/2/3、OPT、GPT-J、BLOOM 等模型使用过 LayerNorm。
3.2 RMSNorm
RMSNorm 不减均值,只按 root mean square 缩放:
RMSNorm(x) = x / sqrt(mean(x^2) + eps) gamma特点:
-
不计算 mean。
-
通常没有 bias 项。
-
参数更少,数据移动更少。
-
LLaMA family、PaLM、Chinchilla、T5 等模型使用 RMSNorm。
3.3 为什么 RMSNorm 会更快?
表面解释:
-
少一次 mean 计算。
-
少一个 bias 参数。
-
操作更简单。
更重要的解释:
-
FLOPs 不等于 runtime。
-
Norm 层相比大矩阵乘法 FLOPs 很小,但它们会读写大量 activation。
-
这类操作常常受 memory bandwidth / data movement 限制。
-
RMSNorm 减少数据移动和中间计算,因此 wall-clock time 可能有明显收益。
讲义强调的观念:
不要只数 FLOPs。很多真实速度瓶颈来自内存访问、kernel launch、数据搬运和融合程度。3.4 小结
| 选择 | 现代经验 |
|---|---|
| pre-norm | 几乎所有现代 LLM 的默认 |
| RMSNorm | 常见,速度更好,效果通常不差 |
| no bias | 常见,参数和内存移动更少 |
| double norm | 一些新模型使用,用于稳定性 |
4. 去掉 bias terms
现代 Transformer 往往会去掉 linear layer 和 norm 中的 bias。
非 gated FFN 常见写法:
FFN(x) = activation(x W1) W2而不是:
FFN(x) = activation(x W1 + b1) W2 + b2原因:
-
bias 的参数量相对小,但每层都要读写,仍有 memory movement 成本。
-
对最终效果通常不是关键。
-
去掉 bias 可以简化实现,也可能改善优化稳定性。
注意:这里不是说 bias 的 FLOPs 很大,而是说现代大模型里许多“看似小”的参数和操作都可能在真实系统里带来额外的数据移动成本。
5. FFN 与 activation:ReLU、GELU、SwiGLU
5.1 标准 FFN
Transformer block 里的 MLP/FFN 通常是:
x -> Linear(dmodel, dff) -> activation -> Linear(dff, dmodel)在语言模型中,FFN 往往占大量参数和计算,因此 activation 选择会影响模型质量和效率。
5.2 常见 activation
| Activation | 公式 | 代表模型 |
|---|---|---|
| ReLU | max(0, x) | Original Transformer、T5、Gopher、Chinchilla、OPT |
| GELU | x * Phi(x) | GPT-1/2/3、GPT-J、GPT-NeoX、BLOOM |
| Swish | x * sigmoid(x) | 常作为 SwiGLU 的组成部分 |
| GLU family | activation branch 乘以 gate branch | LLaMA、PaLM、Mistral、OLMo、很多 2023 后模型 |
GELU 中的 Phi(x) 是标准正态分布的 CDF。直觉上,GELU 是比 ReLU 更平滑的门控。
5.3 GLU family 的核心思想
普通 ReLU FFN:
FFNReLU(x) = ReLU(x W1) W2GLU 会额外引入一个 gate branch:
FFNReGLU(x) = (ReLU(x W1) (x V)) W2其中 * 是 elementwise multiplication,V 是额外的投影矩阵。
类似地:
FFNGeGLU(x) = (GELU(x W1) (x V)) W2
FFNSwiGLU(x) = (Swish(x W1) (x V)) W2直觉:
-
一条分支产生候选特征。
-
另一条分支决定每个维度应该开多大。
-
这种动态门控通常比单纯 activation 更表达性强。
5.4 为什么 GLU 的 d_ff 常缩小到 2/3?
GLU 多了一个上投影矩阵,所以如果 d_ff 不变,参数量会增加。
非 gated FFN,若 d_ff = 4 d_model:
W1: dmodel x 4dmodel
W2: 4dmodel x dmodel
total ≈ 8 dmodel^2GLU FFN 有两个上投影和一个下投影:
W1: dmodel x dff
V : dmodel x dff
W2: dff x dmodel
total ≈ 3 dmodel dff令总参数量接近 8 d_model^2:
3 dmodel dff ≈ 8 dmodel^2
dff ≈ 8/3 dmodel所以现代 SwiGLU/GeGLU 模型常见:
dff ≈ 2.66 dmodel5.5 GLU 是否真的有效?
讲义结论:
-
GLU 不是训练好模型的必要条件,例如 GPT-3 没有用 GLU。
-
但实验和后续模型经验显示,SwiGLU / GeGLU 往往有稳定的小收益。
-
2023 年后的模型大多偏向 SwiGLU。
例外:
-
Nemotron 340B 使用 Squared ReLU。
-
Falcon 2 11B 使用 ReLU。
6. Serial vs Parallel Transformer blocks
6.1 Serial block
常规 Transformer block 是串行的:
x1 = x + Attention(Norm(x))
y = x1 + MLP(Norm(x1))即 attention 先执行,MLP 再基于 attention 后的结果执行。
6.2 Parallel block
parallel block 会并行计算 attention 和 MLP:
y = x + Attention(Norm(x)) + MLP(Norm(x))潜在好处:
-
Attention 和 MLP 可以共享 LayerNorm/RMSNorm。
-
某些矩阵乘法可以融合。
-
计算图更适合并行和优化。
使用过 parallel layers 的模型包括 GPT-J、PaLM、GPT-NeoX,近期还有 Cohere Command A、Falcon 2 11B、Command R+。
讲义态度:
-
没有非常彻底的 ablation 证明它一定更好。
-
但它有明确的 compute / implementation 方面收益。
7. 架构部分总结
| 问题 | 现代默认答案 | 备注 |
|---|---|---|
| pre-norm 还是 post-norm | pre-norm | 几乎所有现代 LLM 选择 |
| LayerNorm 还是 RMSNorm | RMSNorm 越来越常见 | 更少数据移动,效果通常不差 |
| FFN activation | SwiGLU / GeGLU | ReLU/GELU 仍可工作 |
| bias terms | 通常去掉 | 简化参数和数据移动 |
| serial 还是 parallel block | 两者都存在 | parallel 有潜在 compute win |
一个保守强 baseline:
pre-norm + RMSNorm + RoPE + SwiGLU + no bias8. Position embeddings
8.1 为什么需要位置编码?
Self-attention 本身对 token 顺序没有天然感知。如果只看 token embeddings,模型不知道某个词出现在第 1 个位置还是第 100 个位置。
位置编码要解决:
同样的 token 在不同位置应该有不同的表示。
attention 应该能知道 token 之间的相对距离。8.2 几类位置编码
| 类型 | 形式 | 代表模型 |
|---|---|---|
| Sine embeddings | Embed(x, i) = v_x + PE_i | Original Transformer |
| Learned absolute embeddings | Embed(x, i) = v_x + u_i | GPT-1/2/3、OPT |
| Relative embeddings | 在 attention 计算里加入相对位置信息 | T5、Gopher、Chinchilla |
| RoPE | 对 query/key 做按位置变化的旋转 | GPT-J、PaLM、LLaMA、很多 2024+ 模型 |
8.3 RoPE 的目标
RoPE 希望 attention 的位置依赖只与相对位置有关。
理想目标:
<f(x, i), f(y, j)> = g(x, y, i - j)意思是:
-
x在位置i的表示和y在位置j的表示做内积。 -
这个内积应该只依赖 token 内容和相对位置
i - j。 -
不应该依赖绝对位置
i和j本身。
8.4 为什么普通 additive position embedding 不完全满足?
sine 或 absolute embedding 通常是:
Embed(x, i) = vx + pi那么两个 token 的内积会展开成:
<vx + pi, vy + pj>
= <vx, vy> + <vx, pj> + <pi, vy> + <pi, pj>问题:
-
出现了 token 内容和绝对位置的 cross terms。
-
这些项不一定只依赖
i - j。 -
absolute learned embeddings 更明显依赖绝对位置。
8.5 RoPE 的核心技巧:旋转
内积对共同旋转不变:
<R a, R b> = <a, b>RoPE 利用这个性质,让每个位置对应一个旋转矩阵。对 query 和 key 分别按各自位置旋转:
qi = Ri q
kj = Rj k
attention score = <Ri q, Rj k>由于旋转矩阵有组合性质:
Ri^T Rj = R{j - i}所以:
<Ri q, Rj k> = q^T R{j - i} k这就让 attention score 自然依赖相对位置。
8.6 RoPE 怎么实现?
RoPE 通常把 head dimension 中的坐标两两配对,每一对做 2D 旋转。可以把每一对维度看成一个复数的实部和虚部。
对一对坐标:
[x1, x2] -> [x1 cos(theta) - x2 sin(theta),
x1 sin(theta) + x2 cos(theta)]不同维度对使用不同频率,不同位置使用不同角度。
实现流程:
-
输入经过线性层得到
q、k、v。 -
根据 position index 和 head dimension 生成
cos/sin。 -
对
q和k应用 RoPE 旋转。 -
用旋转后的
q、k做标准 attention:
Attention(Q, K, V) = softmax(Q K^T / sqrt(dhead)) V重要区别:
-
sine embedding 是加到 token embedding 上。
-
RoPE 是乘法式旋转,作用在每一层 attention 的 query/key 上。
-
RoPE 不直接旋转 value。
9. Hyperparameter 1:d_ff / d_model
9.1 默认规则
非 gated FFN 的经典经验:
dff = 4 dmodel这个规则在很多模型中都成立。
GLU 变体的常见经验:
dff = 8/3 dmodel ≈ 2.66 dmodel原因是 GLU 多一个 gate projection,把 d_ff 缩到 2/3 后,整体参数量接近非 gated 的 4 d_model FFN。
9.2 GLU 模型中的实际比例
| Model | d_ff / d_model |
|---|---|
| PaLM | 4 |
| Mistral 7B | 3.5 |
| LLaMA-2 70B | 3.5 |
| LLaMA 70B | 2.68 |
| Qwen 14B | 2.67 |
| DeepSeek 67B | 2.68 |
| Yi 34B | 2.85 |
| T5 v1.1 | 2.5 |
讲义结论:
-
大多数模型大致落在
2.5到4之间。 -
8/3是很常见的保守默认值。
9.3 T5 的极端例外
T5 11B 使用了非常激进的设置:
dff = 65,536
dmodel = 1,024
dff / dmodel = 64这说明:
-
d_ff = 4 d_model不是数学定律。 -
极端设置也可能训练出可用模型。
-
但 T5 v1.1 后来改成更标准的 GeGLU + 2.5 倍,因此 64 倍大概率不是最优选择。
9.4 经验解释
Kaplan 等工作显示,d_ff / d_model 在 1 到 10 之间存在比较宽的 near-optimal basin。
实践建议:
如果没有强理由:
非 gated FFN 选 4d
SwiGLU / GeGLU 选 8/3 d10. Hyperparameter 2:head dim、num heads、model dim
10.1 常见关系
最常见的设置是:
numheads headdim = dmodel但这不是必须的。可以让所有 head 的维度总和大于 d_model,例如某些 Google 系模型。
10.2 例子
| Model | Num heads | Head dim | Model dim | Ratio |
|---|---|---|---|---|
| GPT-3 | 96 | 128 | 12288 | 1 |
| T5 | 128 | 128 | 1024 | 16 |
| T5 v1.1 | 64 | 64 | 4096 | 1 |
| LaMDA | 128 | 128 | 8192 | 2 |
| PaLM | 48 | 258 | 18432 | 1.48 |
| LLaMA-2 | 64 | 128 | 8192 | 1 |
这里的 ratio 是:
ratio = numheads headdim / dmodel10.3 该怎么选?
经验:
-
多数现代模型 ratio 接近
1。 -
T5、LaMDA、PaLM 是明显例外。
-
论文中有人担心
ratio = 1会造成 low-rank bottleneck,但实践中没有看到特别严重的问题。
实践建议:
从 ratio = 1 开始。
常见 headdim 是 64 或 128。
除非有明确实验或系统需求,不要先把 attention projection 做得很特殊。11. Hyperparameter 3:深度 vs 宽度,也就是 aspect ratio
11.1 问题
给定参数预算时,模型应该:
-
更深:更多 layers。
-
更宽:更大的
d_model。
讲义用一个粗略指标看主流模型:
aspect ratio = dmodel / nlayers11.2 主流模型范围
| Model | d_model / n_layers |
|---|---|
| BLOOM | 205 |
| T5 v1.1 | 171 |
| PaLM 540B | 156 |
| GPT-3 / OPT / Mistral / Qwen | 128 |
| LLaMA / LLaMA-2 / Chinchilla | 102 |
| T5 11B | 43 |
| GPT-2 | 33 |
讲义观察:
-
很多现代模型集中在
100到200左右。 -
不是所有模型都在这个范围内,但这个范围很常见。
11.3 系统因素很重要
极深模型的问题:
-
更难并行化。
-
延迟更高,因为层必须按顺序执行。
-
pipeline parallelism、activation checkpointing、通信调度都会更复杂。
极宽模型的问题:
-
单层矩阵更大。
-
激活和参数内存更高。
-
tensor parallelism 压力更大。
实践建议:
模型深宽比不是纯算法问题。
在质量相近时,系统吞吐、延迟、并行策略会决定最终选择。12. Hyperparameter 4:vocabulary size
12.1 单语模型
单语模型常见 vocab size:
30k - 50k例子:
| Model | Vocab size |
|---|---|
| Original Transformer | 37000 |
| GPT | 40257 |
| GPT-2 / GPT-3 | 50257 |
| T5 / T5 v1.1 | 32128 |
| LLaMA | 32000 |
12.2 多语和生产系统
多语模型、生产模型常见 vocab size:
100k - 250k例子:
| Model | Vocab size |
|---|---|
| mT5 | 250000 |
| PaLM | 256000 |
| GPT-4 | 100276 |
| Command A | 255000 |
| DeepSeek | 100000 |
| Qwen 15B | 152064 |
| Yi | 64000 |
12.3 怎么理解 vocab size?
vocab size 的影响:
-
太小:文本被切得更碎,sequence length 变长,训练和推理更贵。
-
太大:embedding / LM head 参数增加,稀有 token 学习更困难。
-
多语模型需要覆盖更多文字、词形和符号,因此通常需要更大 vocab。
实践建议:
英语/单语模型:30k-50k 是常见范围。
多语/生产模型:100k-250k 很常见。13. Regularization:dropout 与 weight decay
13.1 预训练还需要 dropout 吗?
反对使用 dropout 的理由:
-
预训练数据非常大,可能有 trillions of tokens。
-
通常只对语料做一遍或少数几遍训练,不像小数据集那样容易记忆训练集。
-
dropout 会降低有效容量,也可能影响吞吐。
但历史上很多模型仍使用 dropout。
13.2 实际模型中的选择
| Model | Dropout | Weight decay |
|---|---|---|
| Original Transformer | 0.1 | 0 |
| GPT-2 | 0.1 | 0.1 |
| T5 | 0.1 | 0 |
| GPT-3 | 0.1 | 0.1 |
| T5 v1.1 | 0 | 0 |
| PaLM | 0 | variable |
| OPT | 0.1 | 0.1 |
| LLaMA | 0 | 0.1 |
| Qwen 14B | 0.1 | 0.1 |
趋势:
-
老模型更常使用 dropout。
-
新模型更常把 dropout 设为 0。
-
weight decay 仍然常见。
13.3 Weight decay 不只是防过拟合
讲义提到 Andriushchenko et al. 2023 的观察:LLM 中 weight decay 的作用不只是控制 overfitting。
它还会影响:
-
learning rate schedule。
-
参数范数。
-
优化轨迹。
-
训练稳定性。
特别是在 cosine learning rate schedule 下,weight decay 和学习率动态会发生交互。
实践建议:
大规模预训练:dropout 可以从 0 开始。
weight decay 常作为优化动态的一部分保留,例如 0.1。14. Hyperparameters 总结
| 问题 | 常见默认值 | 讲义态度 |
|---|---|---|
d_ff / d_model | 非 gated: 4; GLU: 8/3 | 有证据支持,但不是铁律 |
num_heads * head_dim / d_model | 1 | 主流默认,验证证据不算强 |
深宽比 d_model / n_layers | 100-200 常见 | 系统因素很关键 |
| vocab size | 单语 30k-50k,多语 100k-250k | 取决于语言覆盖和 tokenizer |
| dropout | 新模型常为 0 | 数据足够大时不一定需要 |
| weight decay | 常见 0.1 | 更多影响优化动态 |
15. Stability tricks:稳定训练的几个小技巧
15.1 稳定性问题常出现在哪里?
讲义特别提醒:
Beware of softmaxes.softmax 涉及:
-
exponentials。
-
normalization by sum。
-
logits 过大时可能导致数值不稳定。
-
attention 和 output distribution 都依赖 softmax。
所以稳定性技巧经常围绕两个地方:
-
output softmax。
-
attention softmax。
15.2 Output softmax 的 z-loss
语言模型输出 softmax:
p(y | x) = exp(logity) / sumj exp(logitj)cross entropy 中的 log normalizer:
log Z = log sumj exp(logitj)z-loss 会惩罚这个 normalizer:
zloss = lambda (log Z)^2作用:
-
防止 logits 整体尺度无限变大。
-
提高 softmax 数值稳定性。
-
PaLM 推广了这个技巧。
讲义列出的相关模型包括 PaLM、Baichuan 2、DCLM、OLMo 2。
15.3 Attention softmax 的 QK norm
Attention score:
score = q k^T / sqrt(dhead)如果 q 或 k 范数变得很大,进入 softmax 的 score 会变得极端,导致训练不稳定。
QK norm 的做法:
q = Norm(q)
k = Norm(k)
score = q k^T / sqrt(dhead)可以使用 LayerNorm 或 RMSNorm。
作用:
-
控制 attention logits 的尺度。
-
减少 softmax 过尖或数值爆炸。
-
在 DCLM、OLMo 2、Gemma 2 等模型中出现。
15.4 Logit soft-capping
logit soft-capping 用 tanh 把 logits 限制在某个范围内:
logits = cap tanh(logits / cap)作用:
-
防止 logits 爆炸。
-
改善数值稳定性。
风险:
-
如果 cap 太小,可能限制模型表达能力。
-
可能带来性能损失。
15.5 稳定性技巧小结
| 技巧 | 作用位置 | 主要目的 |
|---|---|---|
| z-loss | output softmax | 控制输出 logits 尺度 |
| QK norm | attention softmax | 控制 attention score 尺度 |
| logit soft-capping | output 或 attention logits | 强制限制 logits 范围 |
实践上,不要一开始就堆满所有 trick。先用稳定 baseline,如果看到 loss spike、logit scale 异常、attention score 爆炸,再有针对性加入。
16. Attention heads:MQA、GQA 与推理成本
16.1 训练时 attention 为什么还可以接受?
全量训练时,整个 sequence 可以并行处理。矩阵乘法规模大,GPU 可以保持较高利用率。
粗略地说:
-
attention 中有大矩阵乘法。
-
batch 和 sequence 维度可以并行。
-
arithmetic intensity 相对更高。
因此训练时的瓶颈常常可以被高效 kernel 和并行化缓解。
16.2 推理时问题变了:incremental decoding
生成文本时,token 必须一步一步生成:
生成第 t 个 token -> 才知道第 t+1 个 token 的输入不能像训练那样一次并行处理所有未来 token。
为了避免每步重新计算历史 token 的 key/value,推理会保存 KV cache:
KV cache = 每一层、每个历史 token 的 key 和 value问题:
-
context 越长,KV cache 越大。
-
每生成一个新 token,都要读取历史 KV。
-
推理常常变成 memory bandwidth limited,而不是纯 compute limited。
16.3 MQA:Multi-Query Attention
标准 multi-head attention:
每个 query head 都有自己的 key head 和 value headMQA 的关键思想:
多个 query heads 共享一组 key/value heads极端情况下:
many Q heads, one K head, one V head好处:
-
KV cache 大幅变小。
-
推理时需要从显存读取的 K/V 更少。
-
对长上下文和高吞吐推理非常有利。
代价:
-
表达能力可能下降。
-
Shazeer 2019 观察到 MQA 可能带来小的 perplexity 损失。
16.4 GQA:Grouped-Query Attention
GQA 是 MQA 和标准 MHA 之间的折中。
做法:
把 query heads 分成若干组。
每组 query heads 共享一组 key/value heads。它提供一个可调旋钮:
| 方法 | KV heads 数量 | 推理效率 | 表达能力 |
|---|---|---|---|
| MHA | 与 Q heads 相同 | 最低 | 最高 |
| GQA | 少于 Q heads | 中等到高 | 通常接近 MHA |
| MQA | 1 组 K/V | 最高 | 可能略低 |
讲义结论:
-
MQA 有时会有小的 PPL hit。
-
GQA 往往能在效率和质量之间取得更好的折中。
-
Ainslie 2023 观察到 GQA 可以做到 low/no hit。
16.5 什么时候该关心 GQA/MQA?
如果目标主要是训练小模型或做课程实现,标准 MHA 更简单。
如果目标是部署推理,尤其是:
-
长上下文。
-
大 batch serving。
-
高 QPS。
-
显存带宽成为瓶颈。
那么 GQA/MQA 会变得非常重要。
17. Sparse attention 与 sliding window attention
17.1 全 attention 的成本
标准 full self-attention 对 sequence length 是二次复杂度:
attention matrix size = n x n
cost roughly grows as O(n^2)上下文很长时,这会非常贵。
17.2 Sparse / structured attention
思想:
不要让每个 token attend 到所有 token。
只允许 attend 到某些结构化位置。例子:
-
strided attention。
-
block sparse attention。
-
local + global attention。
这类方法在 GPT-3 相关工作和 Child et al. 2019 中出现过。
权衡:
-
速度和内存更好。
-
表达能力可能下降。
-
实现复杂度更高。
17.3 Sliding window attention
sliding window attention 只让 token attend 到附近窗口:
token i 只看 [i - window, i] 范围内的 token优点:
-
attention cost 从全局二次变得更接近局部线性。
-
对局部依赖很强的语言建模很有效。
-
Mistral 等模型使用过。
为什么仍能传递远距离信息?
第 1 层传播局部信息。
第 2 层在局部信息基础上继续传播。
层数越深,有效 receptive field 越大。17.4 Full attention 和 local attention 交替
近期常见技巧:
大多数层使用 local / sliding window attention。
每隔若干层使用一次 full attention。讲义例子:
-
Cohere Command A:每 4 层有一层 full attention。
-
长程信息可以通过 full/no-position attention 传播。
-
短程信息可以通过 RoPE + sliding window attention 处理。
-
LLaMA 4、Gemma 等也使用过 SWA + full attention 的组合。
实践理解:
local attention 负责便宜地处理短程上下文。
periodic full attention 负责让信息跨窗口流动。18. 从零搭模型时的决策清单
如果要实现一个现代 decoder-only LM baseline,可以按这个顺序决定:
| 决策 | 推荐起点 | 为什么 |
|---|---|---|
| Block norm | pre-norm | 现代共识,训练稳定 |
| Norm type | RMSNorm | 更快,效果通常不差 |
| Bias | no bias | 现代常见,减少参数和数据移动 |
| Position | RoPE | 主流、相对位置信息自然 |
| FFN | SwiGLU | 现代默认,通常有小收益 |
d_ff | 8/3 d_model | 保持 GLU 参数量接近标准 FFN |
| Head ratio | num_heads * head_dim = d_model | 简单保守 |
| Head dim | 64 或 128 | 常见硬件友好值 |
| Dropout | 0 起步 | 大规模预训练常见 |
| Weight decay | 0.1 起步 | 常用于优化动态 |
| Stability | 先不加,必要时加 z-loss/QK norm | 避免过早复杂化 |
| Inference | 需要部署时考虑 GQA | 降低 KV cache 成本 |
一个最小现代 block:
for each layer:
x = x + Attention(RMSNorm(x), RoPE, nobias)
x = x + SwiGLU(RMSNorm(x), dff = 8/3 dmodel, nobias)
final:
logits = LMHead(RMSNorm(x))如果要优化推理:
MHA -> GQA
full attention -> sliding window + periodic full attention19. 常见误区
19.1 “某个模型用了某技巧,所以一定要用”
不一定。很多技巧只在特定 scale、数据、硬件、训练代码下有意义。
更好的问法:
这个技巧解决什么问题?
我现在是否遇到了这个问题?
它带来的复杂度是否值得?19.2 “FLOPs 少就一定快”
不一定。RMSNorm 的例子说明:
-
Norm 层 FLOPs 不大。
-
但内存读写和 kernel 效率会影响 runtime。
-
系统层面的性能要看 arithmetic intensity、memory bandwidth、fusion、parallelism。
19.3 “训练效率和推理效率是同一个问题”
不是。
训练:
-
大 batch。
-
整段 sequence 并行。
-
大矩阵乘法主导。
推理:
-
自回归逐 token。
-
KV cache 反复读写。
-
内存带宽和 latency 更关键。
因此 GQA/MQA 主要是推理效率技巧,而不是单纯为了训练 loss。
19.4 “超参数默认值是理论定律”
不是。d_ff = 4d_model、head ratio 1、aspect ratio 100-200 都是经验稳定点。
它们是好起点,但不是不可改变的规则。
20. 复习问题
| 问题 | 你应该能答出 |
|---|---|
| 为什么现代 LLM 几乎都用 pre-norm? | residual stream 更稳定,梯度传播更好,减少 spike |
| RMSNorm 相比 LayerNorm 少了什么? | 不减 mean,通常无 bias,只按 RMS 缩放 |
SwiGLU 为什么常用 8/3 d_model? | 多一个 gate projection,缩小 d_ff 后参数量接近非 gated 4x FFN |
| RoPE 为什么是相对位置编码? | 旋转后 Q/K 内积依赖 j - i |
num_heads * head_dim = d_model 是必须的吗? | 不是,但多数模型这么做 |
| 为什么新模型常不用 dropout? | 数据巨大、单 pass,不一定需要传统防过拟合 |
| weight decay 在 LLM 中只防 overfitting 吗? | 不是,还影响优化动态和 LR schedule |
| z-loss 惩罚什么? | logsumexp(logits) 的平方,控制 output logits 尺度 |
| QK norm 解决什么? | 控制 attention score 尺度,避免 softmax 不稳定 |
| MQA/GQA 为什么能提升推理效率? | 减少 KV cache 读写,降低 memory bandwidth 压力 |
| sliding window attention 的代价是什么? | 降低全局可见性,需要深层或 periodic full attention 弥补 |
21. 一句话总复习
Lecture 3 的主旨是:现代 LLM 架构并不是完全自由组合的“魔法配方”,而是一组在大规模训练和部署中被反复验证的工程默认值。pre-norm、RMSNorm、RoPE、SwiGLU、no bias、标准 head ratio、合理 d_ff 倍数构成了强 baseline;z-loss、QK norm、GQA、sliding window attention 则是在稳定性和推理成本压力下逐渐变重要的补充技巧。